
AI「脑补」画面太强了!李飞飞团队新作ZeroNVS,单个视图360度全场景生成(如何用ai画大脑结构图)
近来,利用3D感知扩散模型训练模型,然后对单个物体进行SDS蒸馏的研究数不胜数。
但是,能够真正做到「场景级」的画面生成,从未实现。
现如今,斯坦福李飞飞和谷歌团队打破了这个记录!
比如,输入一张从某个角度拍摄的客厅图片,整个客厅的样貌就出来了。

再来一张角度很偏的屋子拐角图,也能生成一个意想不到的空间。

还有各种物体室内、户外的全场景图。
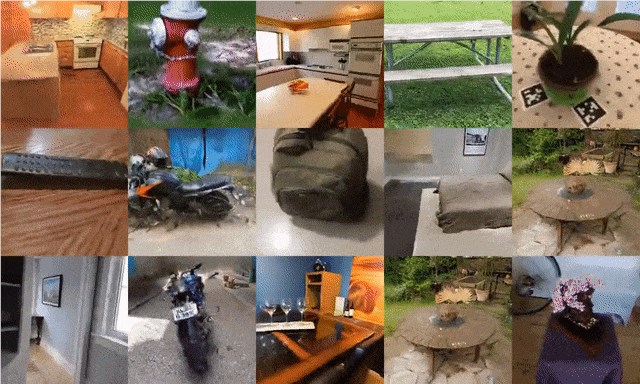
看到这儿,不得不不让人惊呼AI「脑补」简直强的一批!
那么,这究竟是如何实现的呢?
3D感知扩散模型——ZeroNVS
最新论文中,斯坦福和谷歌研究人员引入了一种3D感知扩散模型——ZeroNVS。
论文地址:https://arxiv.org/pdf/2310.17994.pdf
单图像、360度新视图合成 (NVS) 的模型,在生成图像时应该逼真且多样化。
合成图像对于我们来说,应该看起来自然且3D一致,并且它们还应该捕获不可观察区域的许多可能的解释。
以往,这个具有挑战性的问题,通常是在单个物体,甚至没有背景下研究的,也就是说,对真实性和多样性的要求都被简化了。
最近的研究依赖于高质量大规模数据集,比如Objaverse-XL,使得条件散射模型能够从新视角产生逼真图像,然后通过SDS蒸馏采样,以提高3D一致性。
同时,由于图像多样性主要体现在背景中,而不是物体中,因此对背景的无知显着降低了合成多样化图像的效果。
事实上,大多数以物体对象为中心的方法,不再将多样性视为衡量标准。
然而,在复杂真实场景生成新视角合成是一个更难的问题,目前还没有包含完整场景真值信息的大规模数据集。
研究人员在研究中对背景进行了建模,以产生多样的结果。
在ZeroNVS中,作者开发了新技术来预测单个真实图像的场景,并且建立在之前在3D感知扩散模型训练(Zero-1-to-3)和SDS蒸馏(DreamFusion)方面的工作基础上。
具体方法
研究人员着手从单个真实图像合成场景级新颖视图的问题。
与之前的工作类似,我们首先训练扩散模型

来执行新颖的视图合成,然后利用它来执行3D SDS蒸馏。
与之前的工作不同地方在于,作者关注的是场景而不是物体。
场景提出了一些独特的挑战。首先,先前的研究使用摄像机和比例的表示,这些表示对于场景来说要么含糊不清,要么表达力不足。
其次,先前研究的推理过程是基于 SDS 的,它具有已知的模式崩溃问题,并且通过大大减少预测视图中的背景多样性在场景中体现出来。
与之前的工作相比,研究人员尝试了通过「改进场景的表示」和「推理程序」来应对这些挑战。

在这个公式中,M的输出,和单个图像的输入

是模型可用于视图合成的唯一信息。
表示视图综合的对象
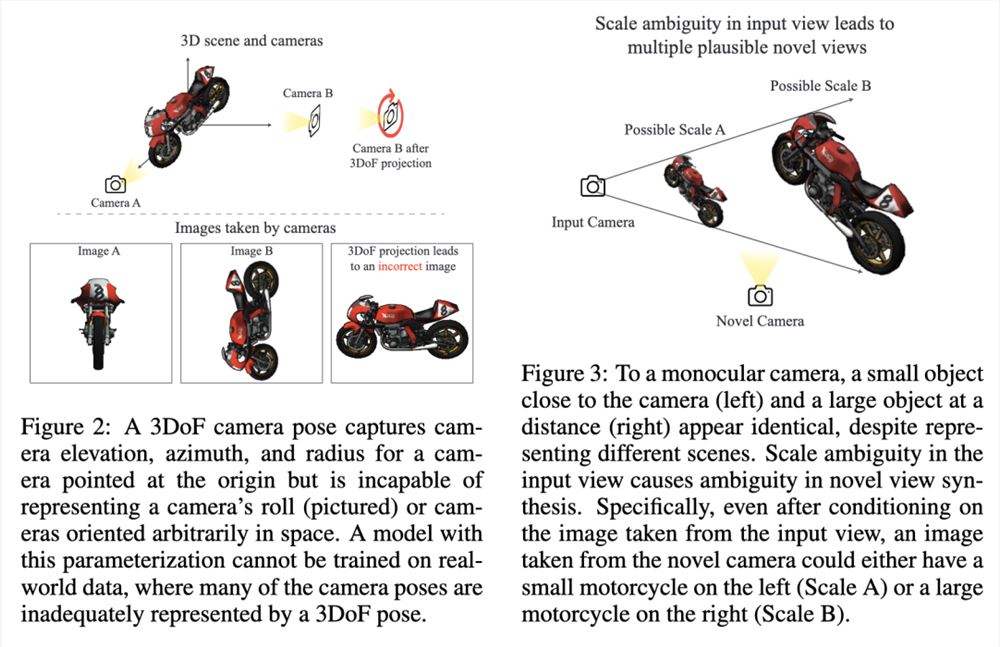
如下图,3DoF相机姿势捕获指向原点的相机的相机仰角、方位角和半径,但无法表示相机的滚动(如图)或空间中任意方向的相机。
具有这种参数化的模型无法在现实世界数据上进行训练,其中许多相机姿势不能用3DoF姿势充分表示。
表示视图合成的通用场景
对于场景,研究人员应该使用具有6个自由度的相机表示,可以捕获所有可能的位置和方向。
捕获六个自由度的相机参数化的一种直接选择是相对位姿参数化。研究人员建议还将视野作为额外的自由度,并将这种组合表示称为「6DoF+1」。
M6DoF+1的一个吸引人的特性是它对于场景的刚性变换具有不变性,因此可以得到:

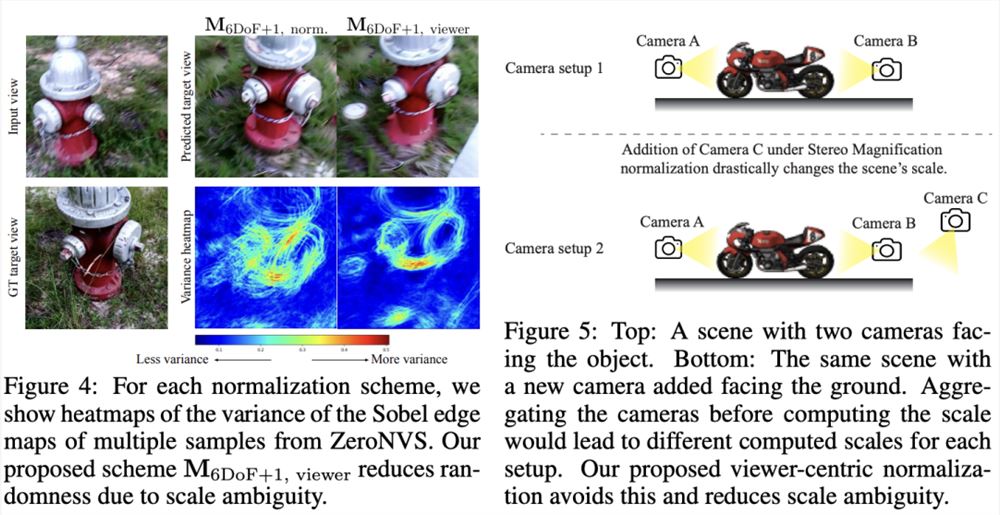
对于每个归一化方案,ZeroNVS中多个样本的Sobel边缘图方差的热图。研究者提出的方案M6DoF+1,观察者减少了由于尺度模糊而导致的随机性。
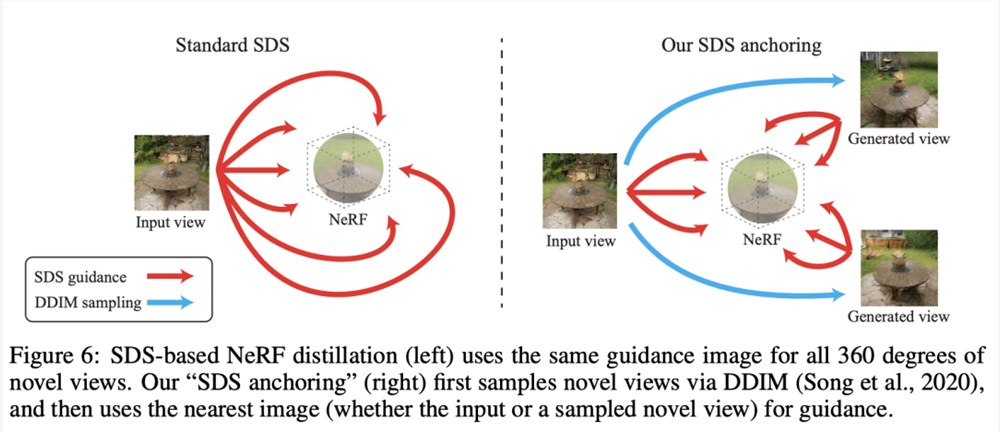
通过SDS anchoring提高多样性
基于SDS的NeRF蒸馏(左)对所有360度新视图使用相同的引导图像。
作者的「SDS anchoring」(右)首先通过DDIM对新视图进行采样,然后使用最近的图像(无论是输入还是采样的新视图)作为指导。
实验结果
再具体评估中,研究人员使用了一组标准的新视图合成指标来评估所有方法:PSNR、SSIM和LPIPS。
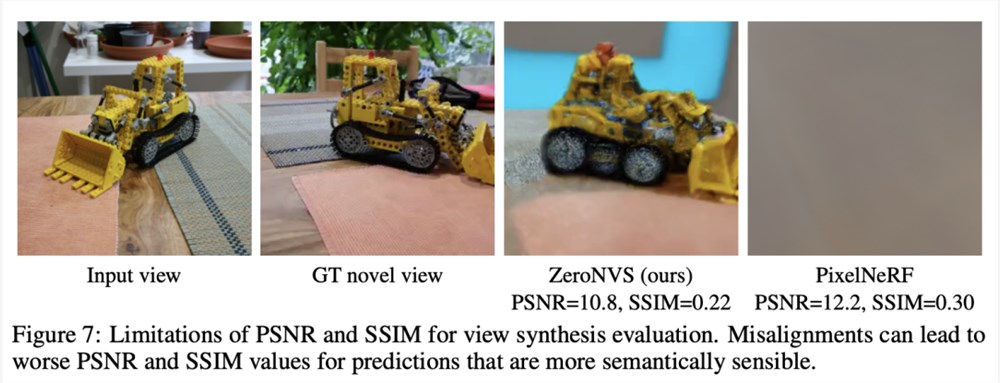
由于PSNR和SSIM有已知缺点,研究人员更看重LPIPS,并确认PSNR和SSIM与问题设置中的性能没有很好的相关性,如图7所示。
结果如表1所示。
首先与基线方法 DS-NeRF、PixelNeRF、SinNeRF、DietNeRF进行比较。
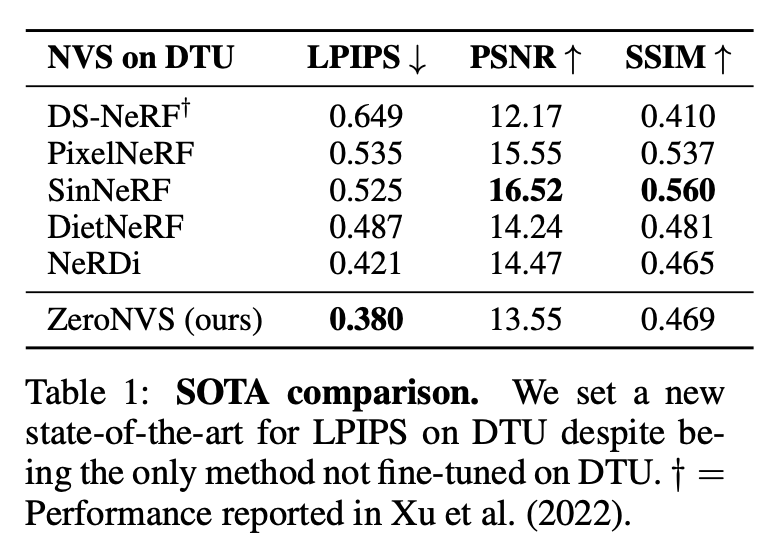
尽管所有这些方法都是在DTU上进行训练的,但研究人员从未在DTU上进行过训练,但实现了最先进的LPIPS零样本。
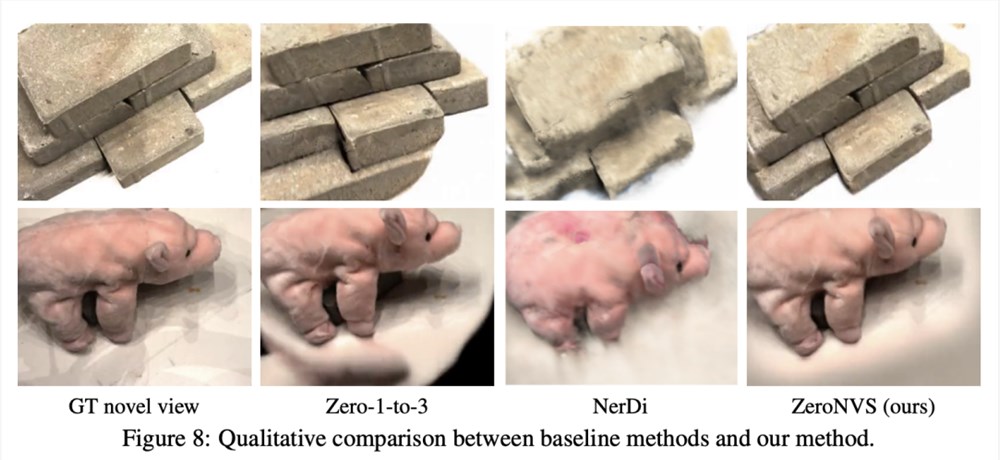
图8中显示了一些定性比较。
DTU场景仅限于相对简单的前向场景。
因此,研究人员还引入了一个更具挑战性的基准数据集,即Mip-NeRF360数据集,来对单张图像的360度视图合成任务进行基准测试。
研究人员使用这个基准作为零样本基准,并在混合数据集上训练3个基线模型来比较零样本性能。
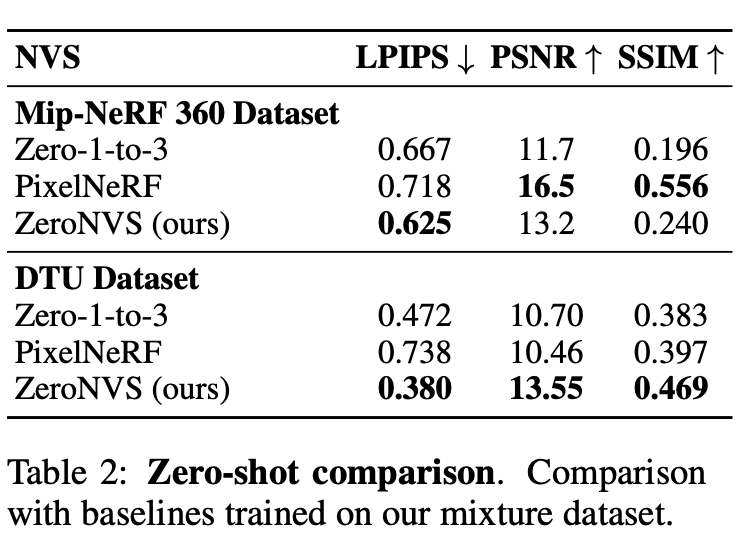
限制这些零样本模型,其方法在该数据集的LPIPS上遥遥领先。在DTU上,新方法在所有指标上都超过了Zero-1-to-3和零样本PixelNeRF模型,而不仅仅是LPIPS,如表2所示。
作者介绍
Kyle Sargent
斯坦福大学的一名博士生,从2022年秋季开始,在斯坦福人工智能实验室工作,导师是Jiajun Wu和李飞飞。
他还曾在谷歌研究院担任学生研究员。
推荐站点
 77分类目录
77分类目录77分类目录(www.77dir.com)中国优质分类目录平台,为您提供免费分类目录提交,网站目录提交入口,中文网址目录收录,网址大全,网站大全,网站外链推广,软文发布等服务,为您分享优质正规的中文网站!
www.77dir.com YY分类目录
YY分类目录YY分类目录全人工编辑的开放式网站分类目录,收录国内外、各行业优秀网站,旨在为用户提供网站分类目录检索、优秀网站参考、网站推广服务。
www.yydir.com 名人百科网
名人百科网名人百科网(mrenbaike.net)--为大家提供各行各业的名人资料、资讯、图片等,致力于打造国内专业的名人百科平台!
www.mrenbaike.net 菜鸟教程
菜鸟教程菜鸟教程提供了基础编程技术教程。 菜鸟教程的 Slogan 为:学的不仅是技术,更是梦想! 记住:再牛逼的梦想也抵不住傻逼似的坚持! 本站域名为 runoob.com, runoob 为 Running Noob 的缩写,意为:奔跑吧!菜鸟。 本站包括了HTML、CSS、Javascript、PHP、C、Python等各种基础编程教程。 同时本站中也提供了大量的在线实例,通过实例,您可以更好地学习如何建站。 本站致力于推广各种编程语言技.
www.runoob.com 中国社会公益网
中国社会公益网陕西省社会公益基金会是经陕西省民政厅批准的公募基金会,下设秘书处、公益项目部、筹款募捐部、宣传策划部、社会活动部、专项基金部、资金管理部、公关联络部、青年志愿者工作委员会、青年志愿者爱心乐团等部门机构
www.cpf.net.cn CNMO科技新媒体
CNMO科技新媒体CNMO=Connect More,致力于通过内容成为人与科技、人与产品、人与品牌、人与服务对接的桥梁,让产业、产品的价值与服务得到专业且有趣的解读和适配,引领用户畅享科技带来的美好生活!
www.cnmo.com 国外主机测评
国外主机测评国外主机测评,国外VPS、云服务器,国外服务器,国外主机的相关优惠信息、商家背景、网络带宽、线路走法、售前和售后技术支持等,是目前最好的一家国外主机评测平台。
www.zhujiceping.com 赵容部落
赵容部落赵容部落,一个收集国内,国外便宜主机,VPS,云服务器,独立服务器优惠促销信息,提供VPS新手教程,VPS评测,VPS代购代付服务的博客。
www.zrblog.net 老左博客
老左博客老左博客,致力于美国VPS,美国主机评测、推荐;分享便宜VPS,美国主机优惠码,Godaddy优惠码,NameCheap等域名优惠码的IT博客,博主老左(LaoZuo.ORG)。
www.laozuo.org